Designing and deploying real-time Digital Signal Processing (DSP) systems involves overcoming several technical hurdles. These challenges span hardware limitations, algorithmic constraints, and real-time performance requirements. Below are the key challenges and their implications:

1. Computational Complexity
Problem
DSP algorithms (e.g., FFT, adaptive filters, convolutional neural networks) require high-speed arithmetic operations (MACs—Multiply-Accumulates per second).
- Example: A 1024-point FFT requires ~10,240 MACs.
- Real-time constraints demand processing within strict time limits (e.g., audio at 44.1 kHz → ~22.7 µs per sample).
Solutions
✔ Optimized DSP libraries (e.g., ARM CMSIS-DSP, Intel IPP).
✔ Parallel processing (SIMD, VLIW architectures in DSP chips).
✔ Fixed-point arithmetic (reduces latency vs. floating-point).
2. Latency & Throughput Requirements
Problem
- Low-latency applications (e.g., active noise cancellation, motor control) require sub-millisecond response times.
- High-throughput systems (e.g., 5G basebands, video processing) need Giga-sample/sec handling.
Solutions
✔ Pipelining (breaks tasks into stages).
✔ Hardware acceleration (FPGA co-processors, GPU offloading).
✔ Block processing (trade-off between latency and efficiency).
3. Memory Constraints
Problem
- Limited on-chip RAM in embedded DSPs (e.g., TI C6000, STM32H7).
- Memory bottlenecks when accessing external SDRAM.
Solutions
✔ Cache optimization (DMA for data transfers).
✔ Circular buffers (efficient real-time data handling).
✔ Memory-efficient algorithms (e.g., in-place FFT).
4. Power Consumption
Problem
- Battery-powered devices (e.g., wearables, IoT sensors) need ultra-low-power DSP.
- High-performance DSPs (e.g., for radar) may consume Watts of power.
Solutions
✔ Clock gating (disable unused cores).
✔ Dynamic voltage/frequency scaling (DVFS).
✔ Approximate computing (trade precision for power savings).
5. Real-Time Operating System (RTOS) Challenges
Problem
- Deterministic scheduling is critical (missed deadlines cause failures).
- Interrupt jitter can disrupt signal processing.
Solutions
✔ Preemptive RTOS (FreeRTOS, Zephyr).
✔ Interrupt prioritization (NVIC settings in ARM Cortex-M).
✔ Hardware timers for precise sampling.
6. Numerical Precision & Stability
Problem
- Fixed-point quantization errors (overflow, rounding).
- Algorithm instability (e.g., IIR filters may diverge).
Solutions
✔ Saturation arithmetic (prevents overflow).
✔ Adaptive filtering (LMS, RLS for dynamic environments).
✔ Error analysis (simulate in MATLAB/Python first).
7. Hardware-Software Co-Design
Problem
- Algorithm selection affects hardware choice (DSP vs. FPGA vs. GPU).
- Bottlenecks in data movement (e.g., CPU ↔ FPGA).
Solutions
✔ HLS (High-Level Synthesis) for FPGAs (Xilinx Vitis, Intel HLS).
✔ Heterogeneous computing (ARM + DSP + FPGA).
8. Real-World Noise & Non-Idealities
Problem
- Sensor noise (ADC quantization, thermal noise).
- Non-linearities (e.g., microphone distortion).
Solutions
✔ Kalman filtering (for noisy measurements).
✔ Calibration routines (correct sensor biases).
9. Debugging & Verification
Problem
- Real-time debugging is hard (no pause/resume).
- Reproducing field issues in the lab.
Solutions
✔ JTAG/SWD tracing (ARM ETM, Segger RTT).
✔ Data logging (stream to PC for post-analysis).
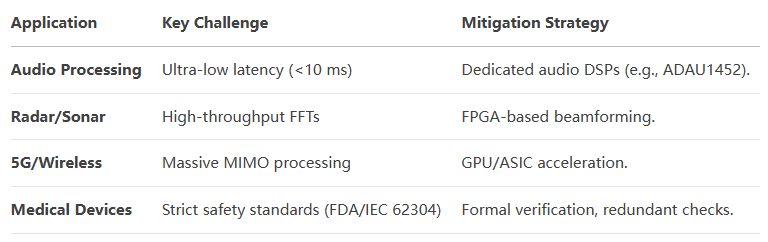
10. Industry-Specific Challenges
Conclusion
Implementing real-time DSP systems requires balancing:
- Speed vs. Power
- Precision vs. Complexity
- Flexibility vs. Determinism
Best Practices:



Top comments (0)